Трм 12 настройка параметров
Настройка прибора предназначена для задания и записи настраиваемых параметров в энергонезависимую память прибора.
Прибор имеет два уровня настройки.
На первом уровне осуществляется просмотр и изменение значений параметров регулирования:
Для доступа к параметрам настройки следует нажать кнопку  .
.
Если в течение 20 секунд при настройке не производится операций с кнопками, прибор автоматически возвращается к работе.
Последовательность работы с прибором на этом уровне настройки приведена на рисунке.
На втором уровне настройки осуществляется просмотр и необходимое изменение функциональных параметров прибора. Функциональные параметры прибора разделены на группы:
Для входа на второй уровень настройки следует нажать и удерживать кнопку не менее 3 секунды.
Последовательности процедуры настройки прибора на втором уровне для обеих групп параметров приведены на рисунках ниже.
118 – Код сброса настраиваемых параметров до заводских установок.
100 – Код отключения компенсации «холодного спая».
Настройка цифровой фильтрации измерений
Для дополнительной защиты от электромагнитных помех в приборе предусмотрен программный цифровой фильтр низких частот. Цифровая фильтрация проводится в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы». Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым полосой фильтра. Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т.е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
На втором этапе фильтрации осуществляется сглаживание (демпфирование) сигнала с целью устранения шумовых составляющих. Основной характеристикой сглаживающего фильтра является «постоянная времени фильтра» – интервал, в течение которого изменение выходного сигнала фильтра достигает значения 0,63 от изменения входного сигнала.
Временные диаграммы работы цифровых фильтров представлены на рисунке.
Коррекция измерительной характеристики датчиков
Для устранения начальной погрешности преобразования входных сигналов, измеренное прибором значение может быть откорректировано. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
При подключении ТС по двухпроводной схеме следует выполнять коррекцию сдвиг характеристики в обязательном порядке. Определение значения параметра сдвиг характеристики производится по методике, приведенной в разделе.

Пфакт – фактическое значение контролируемой входной величины;
Пизм – измеренное прибором значение той же величины.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.
Настройка вычисления квадратного корня
Данная функция предназначена для датчиков с выходным сигналом, пропорциональным квадрату измеряемого сигнала.

Пн – заданное нижнее значение границы диапазона измерения ( b1-5 );
Пв – заданное верхнее значение границы диапазона измерения ( b1-6 );
Настройка ПИД-регулятора
Общие сведения
На рисунке приведена функциональная схема ПИД-регулятора. Основное назначение регулятора – формирование управляющего сигнала Y, задающего выходную мощность ИМ и направленного на уменьшение рассогласования Е или отклонения текущего значения регулируемой величины Т от величины уставки Туст.
В операторной форме формула ПИД-регулятора выглядит следующим образом:

где Кп – пропорциональная составляющая;
1 / (р · Ти) – интегральная составляющая;
р · Тд – дифференциальная составляющая.
На практике, для создания цифровых регуляторов используются разностные формулы, позволяющие работать не с непрерывным во времени сигналом, а с дискретным по времени.
Поэтому для расчета управляющего сигнала на выходе цифрового ПИД-регулятора используется формула:

где Xp – полоса пропорциональности (Xp = 1 / Кп);
Ei – рассогласование или разность между уставкой Туст и текущим значением измеренной величины Тi;
τ д – дифференциальная постоянная;
ΔEi – разность между двумя соседними рассогласованиями Ei и Ei–1;
τ и – интегральная постоянная;
 – накопленная в i-й момент времени сумма рассогласований (интегральная сумма).
– накопленная в i-й момент времени сумма рассогласований (интегральная сумма).
Пропорциональная составляющая зависит от рассогласования Ei и отвечает за реакцию на мгновенную ошибку регулирования.
Интегральная составляющая содержит в себе накопленную ошибку регулирования  и позволяет добиться максимальной скорости достижения уставки.
и позволяет добиться максимальной скорости достижения уставки.
Дифференциальная составляющая зависит от скорости изменения рассогласования  и позволяет улучшить качество переходного процесса.
и позволяет улучшить качество переходного процесса.
Время между соседними измерениями Δtизм определяется временем опроса одного канала измерения.
Параметры настройки регулятора
Для эффективной работы конкретного объекта управления необходимо подобрать коэффициенты ПИД-регулятора: Хр, τи и τд. Для этого в приборе предусмотрен следующий функционал:
Для управления исполнительным механизмом прибор использует оба ВУ, см. рисунок.
Выбор ВУ определяется следующим условием:
Для формирования управляющего сигнала регулятора выходной сигнал ВУ преобразуется в последовательность импульсов согласно следующей формуле:

D – длительность импульса, с;
Y – сигнал на выходе ПИД-регулятора, [%].
Чтобы исключить излишние срабатывания регулятора при небольшом значении рассогласования Ei для вычисления значений Yi используется уточненное значение EР, которое вычисляется в соответствии с условиями:
В случае необходимости можно ограничить максимальную мощность ИМ с помощью функции ограничения управляющего воздействия (рисунок).
Если после автоматической или ручной настройки переходная характеристика объекта отличается от оптимальной (по величине допустимых отклонений и скорости выхода на уставку), необходимо откорректировать заданные параметры регулирования.
Автоматическая настройка ПИД-регулятора
Автоматическая настройка ПИД-регулятора (АНР) предназначена для определения его параметров, путем анализа реакции объекта регулирования на возмущающее воздействие. Процесс автоматической настройки проходит непосредственно на объекте. Для этого следует предварительно сконфигурировать прибор с подключенными к нему датчиками и ИМ. Условия, в которых проводится АНР, должны быть максимально приближены к реальным условиям эксплуатации объекта. Рекомендуется выставить значение уставки, максимально приближенное к рабочей.
Для запуска АНР необходимо выполнить операции, указанные на рисунке.
В процессе выполнения автоматической настройки прибор попеременно индицирует этап, на котором находится АНР, и текущее значение регулируемого параметра. По завершению автоматической настройки все рассчитанные параметры ПИД-регулятора сохраняются в энергонезависимой памяти прибора, а выходные устройства выключаются.
Ручная подстройка ПИД-регулятора
Ручная подстройка осуществляется итерационным методом с оценкой процесса по двум показателям:
В ряде случаев данные действия не могут обеспечить качественную настройку ПИД-регуляторов:
В зависимости от показателей корректировка параметров осуществляется по рекомендациям:
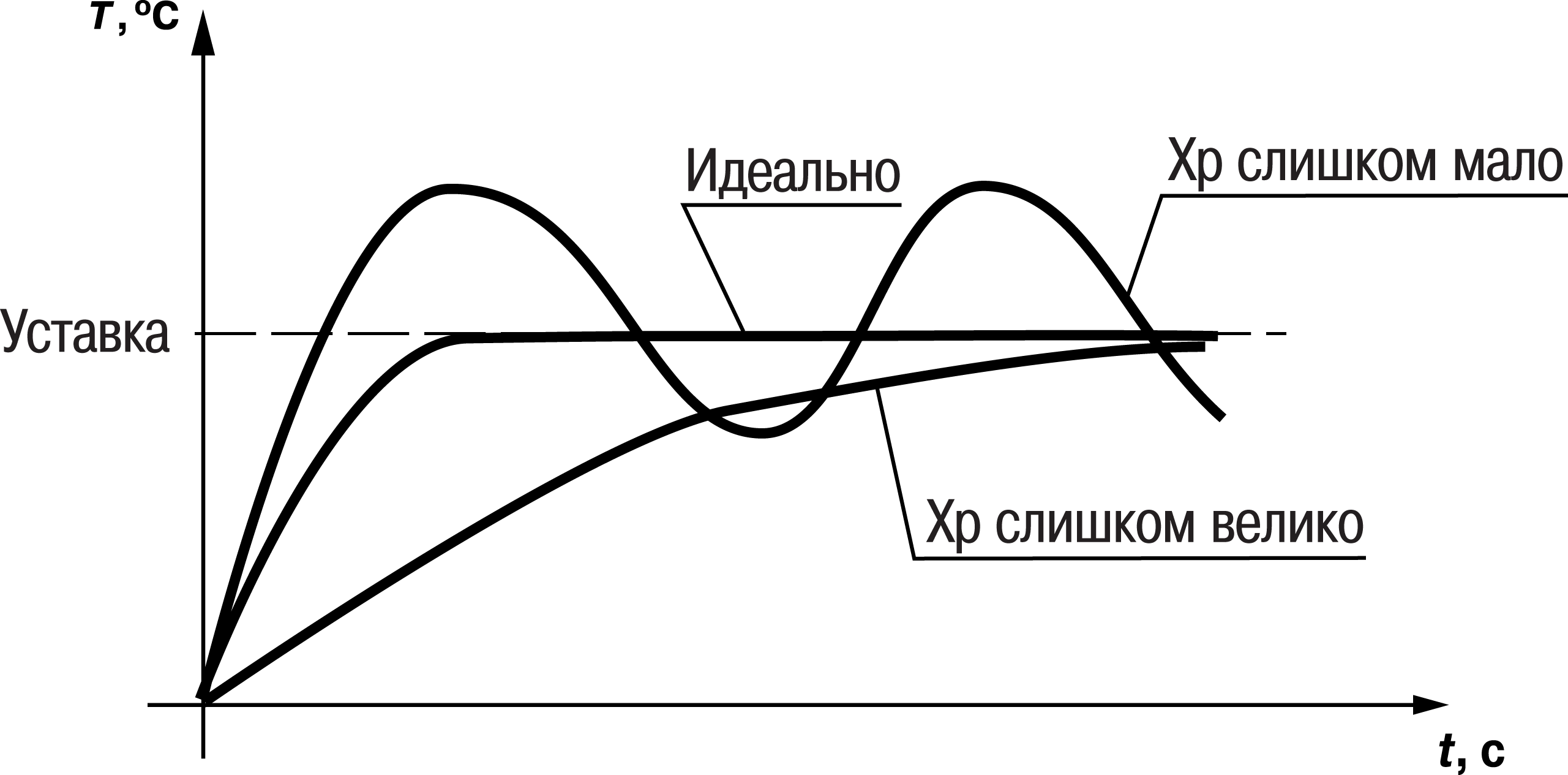
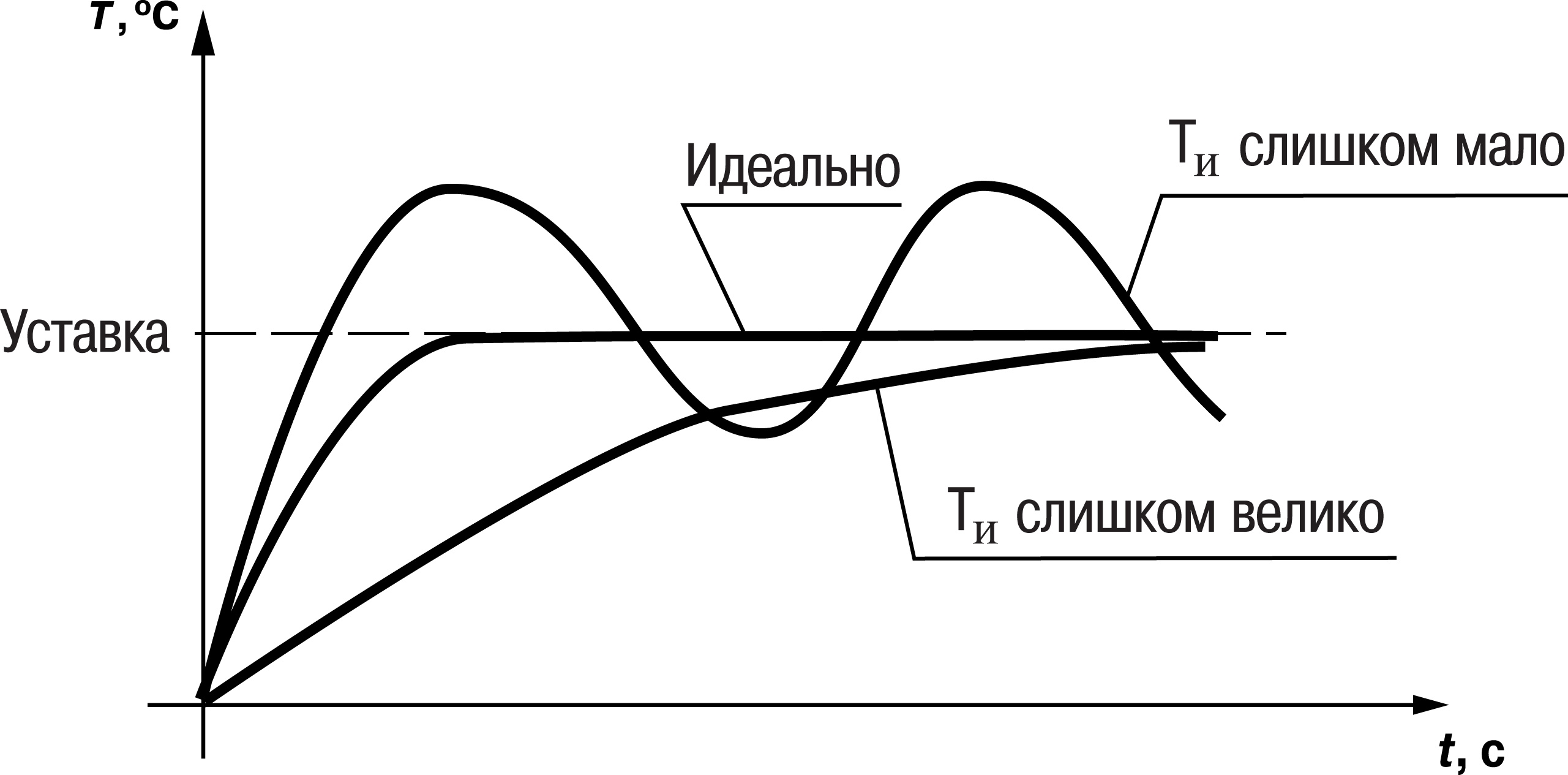
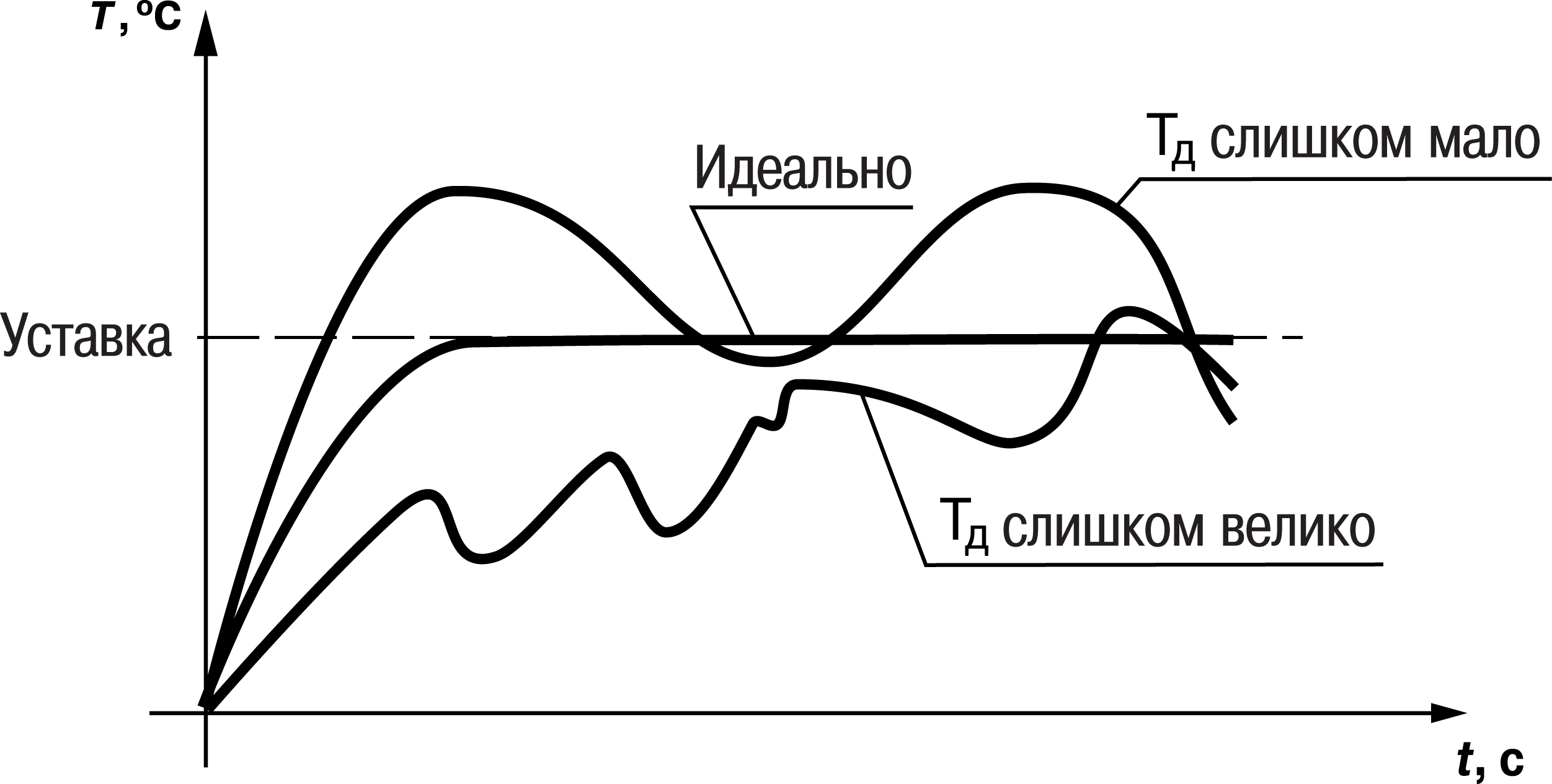
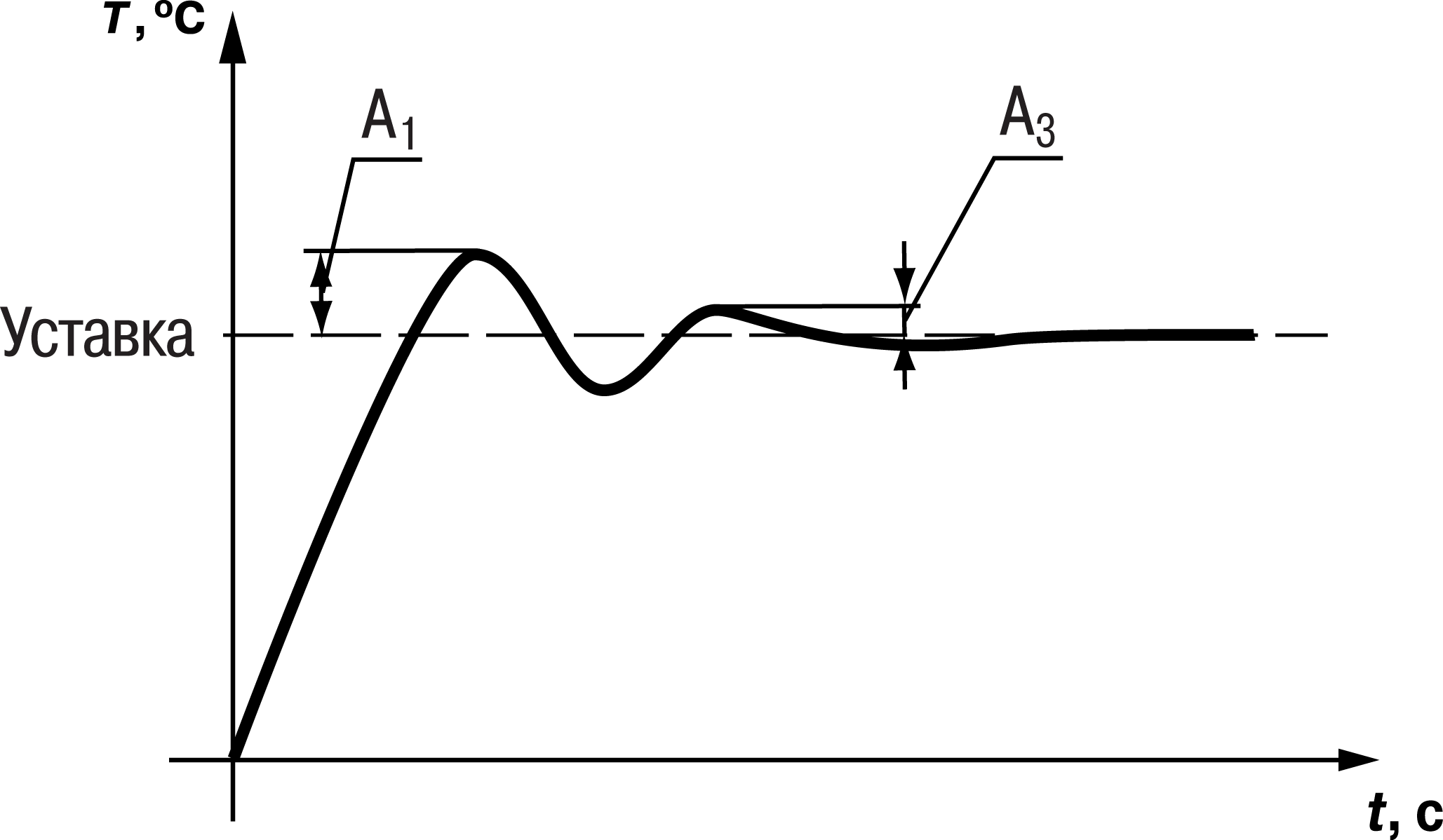
При оптимальной подстройке регулятора график регулируемой величины должен иметь минимальное значение показателя ошибки регулирования (А1) при достаточно степени затухания φ = 1 – А3/А1 (0,8 … 0,9).
Руководство по эксплуатации
Введение
Настоящее Руководство по эксплуатации предназначено для ознакомления обслуживающего персонала с устройством, принципом действия, конструкцией, технической эксплуатацией и обслуживанием измерителя ПИД-регулятора микропроцессорного одноканального ТРМ12 с универсальным измерительным входом (в дальнейшем по тексту именуемого «прибор»).
Подключение, регулировка и техобслуживание прибора должны производиться только квалифицированными специалистами после прочтения настоящего руководства по эксплуатации.
Прибор изготавливается в различных модификациях, зашифрованных в коде полного условного обозначения.
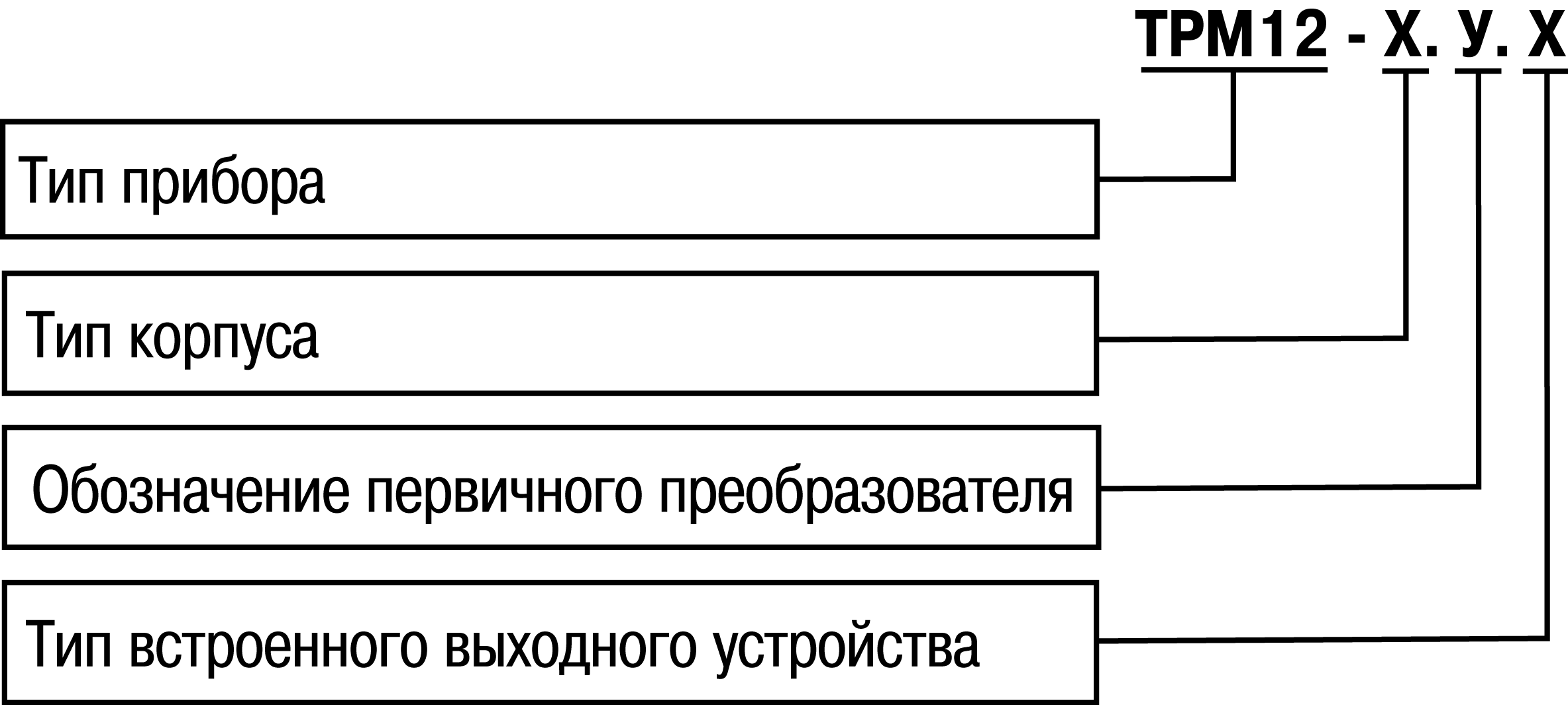
Н – корпус настенного крепления;
Щ1 – корпус щитового крепления;
Щ11 – корпус щитового крепления со съемным клеммником;
Щ2 – корпус щитового крепления;
Д – корпус для установки на DIN-рейку.
Обозначение первичных преобразователей:
У – универсальные измерительные входы.
Тип встроенного ВУ1(2):
Р – контакты электромагнитного реле;
К – оптопара транзисторная n-p-n-типа;
Т – выход для управления внешним твердотельным реле;
С – оптопара симисторная.
Пример записи обозначения прибора в документации другой продукции, где он может быть применен:
Измеритель ПИД-регулятор микропроцессорный одноканальный ТРМ12-Н.У.Р ТУ 4217-041-46526536-2013.
Трм 12 настройка параметров
Для обеспечения надежности электрических соединений следует использовать медные кабели и провода с однопроволочными или многопроволочными жилами. Концы проводов следует зачистить. Многопроволочные жилы следует залудить или использовать кабельные наконечники.
Требования к сечениям жил кабелей указаны на рисунке ниже.
Общие требования к линиям соединений:
Монтируя систему, в которой работает прибор, следует учитывать правила организации эффективного заземления:
Порядок подключения
Если прибор находился длительное время при температуре ниже минус 20 °С, то перед включением и началом работ следует выдержать его в помещении с температурой, соответствующей рабочему диапазону, в течение 30 минут.
Для подключения прибора следует выполнить действия:
Подключить прибор к источнику питания.
Назначение контактов клеммника
Подключение датчиков
Общие сведения
Перечень подключаемых датчиков приведен в таблице.
При проверке исправности датчика и линии связи необходимо отключить прибор от сети питания. Во избежание выхода прибора из строя при «прозвонке» связей следует использовать измерительные устройства с напряжением питания не более 4,5 В. При более высоких напряжениях питания этих устройств отключение датчика от прибора обязательно.
Параметры линии соединения прибора с датчиком приведены в таблице.
Параметры линии связи прибора с датчиками
| Тип датчика | Длина линий, м, не более | Сопротивление линии, Ом, не более | Исполнение линии |
|---|---|---|---|
| ТС | 100 | 15 | Двух- или трехпроводная. Провода равной длины и сечения |
| ТП | 20 | 100 | Термоэлектродный кабель (компенсационный) |
| Унифицированный сигнал постоянного тока | 100 | 100 | Двухпроводная |
| Унифицированный сигнал напряжения постоянного тока | 100 | 5 | Двухпроводная |
Подключение ТС по трехпроводной схеме
В приборе используется трехпроводная схема подключения ТС.
Допускается соединение ТС с прибором по двухпроводной линии только с обязательным выполнением определенных условий (см. раздел ниже).
Подключение ТС по двухпроводной схеме
Соединение ТС с прибором по двухпроводной схеме следует производить в случае невозможности использования трехпроводной схемы, например, при установке прибора на объектах, оборудованных ранее проложенными двухпроводными монтажными трассами.
Для компенсации паразитного сопротивления проводов следует выполнить действия:
Подключение ТП
В приборе предусмотрена схема автоматической компенсации температуры свободных концов ТП. Датчик температуры «холодного спая» установлен рядом с клеммником прибора.
Подключение аналоговых датчиков
Подключать датчики с выходным сигналом в виде постоянного напряжения (от минус 50,0 до 50,0 мВ или от 0 до 1,0 В) можно непосредственно к входным контактам прибора.
Подключение датчиков с выходом в виде тока (0. 5,0 мА, 0. 20,0 мА или 4,0…20,0 мА) следует выполнять только после установки шунтирующего резистора сопротивлением 49,9 Ом (допуск не более 0,1 %), подключение которого необходимо производить в соответствии с рисунком. Вывод резистора следует заводить с той же стороны винтовой клеммы, что и провод от датчика. При использовании провода сечением более 0,35 мм конец провода и вывод резистора необходимо скрутить или спаять.
Невыполнение этого требования может привести к пропаданию контакта между выводом резистора и клеммы, что повлечет повреждение входа прибора!
Схема подключения пассивного датчика с питанием от прибора приведена на рисунке.
Максимальный выходной ток встроенного источника питания (для модификаций с постоянным напряжением питания 20. 375 В) 50 мА.
Подключение нагрузки к ВУ
Подключение нагрузки к ВУ типа Р
Схема подключения нагрузки к ВУ типа Р приведена на рисунке.
Подключение нагрузки к ВУ типа К
Схема подключения нагрузки к ВУ приведена на рисунке. Чтобы транзистор не вышел из строя из-за большого тока самоиндукции, следует установить диод VD1 параллельно обмотке внешнего реле Р1.
Подключение нагрузки к ВУ типа Т
Выход «Т» имеет два состояния: с низким (от 0 до 1 В) и высоким (от 4 до 6 В) уровнем напряжения. В приборе используются выходы, выполненные на основе транзисторного ключа n-p-n–типа.
Выходной элемент не имеет гальванической изоляции. Гальваническую изоляцию обеспечивает само твердотельное реле.
Подключение нагрузки к ВУ типа С
ВУ типа С имеет внутреннюю схему перехода через ноль и включается в цепь управления мощного симистора или пары встречно-параллельно включенных тиристоров через ограничивающий резистор R1 (см. рисунки далее). Величина сопротивления резистора определяет ток управления симистора. Нагрузочная способность выхода – ток не более 50 мА при переменном напряжении не более 250 В. Для предотвращения пробоя тиристоров из-за высоковольтных скачков напряжения в сети к их выводам рекомендуется подключать фильтрующую RC цепочку (R2C1).
Трм 12 настройка параметров
Настройка прибора предназначена для задания и записи настраиваемых параметров в энергонезависимую память прибора.
Прибор имеет два уровня настройки.
На первом уровне осуществляется просмотр и изменение значений параметров регулирования:
Для доступа к параметрам настройки следует нажать кнопку  .
.
Если в течение 20 секунд при настройке не производится операций с кнопками, прибор автоматически возвращается к работе.
Последовательность работы с прибором на первом уровне настройки приведена на рисунке.
На втором уровне настройки осуществляется просмотр и необходимое изменение функциональных параметров прибора. Функциональные параметры прибора разделены на группы:
Для входа на второй уровень настройки следует нажать и удерживать кнопку не менее 3 сек.
Последовательности процедуры настройки прибора на втором уровне для обеих групп параметров приведены на рисунках ниже.
118 – Код сброса настраиваемых параметров до заводских установок.
100 – Код отключения компенсации «холодного спая».
Настройка цифровой фильтрации измерений
Для дополнительной защиты от электромагнитных помех в приборе предусмотрен программный цифровой фильтр низких частот. Цифровая фильтрация проводится в два этапа.
На первом этапе фильтрации из текущих измерений входных параметров отфильтровываются значения, имеющие явно выраженные «провалы» или «выбросы». Для этого прибор вычисляет разность между результатами измерений входной величины, выполненных в двух последних циклах опроса, и сравнивает ее с заданным значением, называемым полосой фильтра. Если вычисленная разность превышает заданный предел, то производится повторное измерение, полученный результат отбрасывается, а значение полосы фильтра удваивается. В случае подтверждения нового значения фильтр перестраивается (т.е. полоса фильтра уменьшается до исходной) на новое стабильное состояние измеряемой величины. Такой алгоритм позволяет защитить прибор от воздействия единичных импульсных и коммутационных помех, возникающих на производстве при работе силового оборудования.
На втором этапе фильтрации осуществляется сглаживание (демпфирование) сигнала с целью устранения шумовых составляющих. Основной характеристикой сглаживающего фильтра является «постоянная времени фильтра» – интервал, в течение которого изменение выходного сигнала фильтра достигает значения 0,63 от изменения входного сигнала.
Временные диаграммы работы цифровых фильтров представлены на рисунке.
Коррекция измерительной характеристики датчиков
Для устранения начальной погрешности преобразования входных сигналов, измеренное прибором значение может быть откорректировано. В приборе есть два типа коррекции, позволяющие осуществлять сдвиг или наклон характеристики на заданную величину.
При подключении ТС по двухпроводной схеме следует выполнять коррекцию сдвиг характеристики в обязательном порядке. Определение значения параметра сдвиг характеристики производится по методике, приведенной в разделе.

Пфакт – фактическое значение контролируемой входной величины;
Пизм – измеренное прибором значение той же величины.
Определить необходимость введения поправочного коэффициента можно, измерив максимальное или близкое к нему значение параметра, где отклонение наклона измерительной характеристики наиболее заметно.
Настройка вычисления квадратного корня
Данная функция предназначена для датчиков с выходным сигналом, пропорциональным квадрату измеряемого сигнала.

Пн – заданное нижнее значение границы диапазона измерения ( b1-5 );
Пв – заданное верхнее значение границы диапазона измерения ( b1-6 );
Режим быстрого измерения
При использовании датчиков с унифицированным сигналом тока и напряжения возможна работа в режиме «быстрого измерения». Время измерения и реакции на изменение входного сигнала тока и напряжения этом случае составляет не более 0,1 секунды на канал. Режим быстрого измерения включается и выключается установкой соответствующего значения параметра b0-5 – «Режим быстрого измерения». При включении режима измерения производятся на обоих входах, при этом прибор автоматически начинает быстрые измерения на том входе, где установлен унифицированный датчик. Общее время реакции на изменение входного сигнала определяется как сумма времени опроса каждого входа, зависящего от установленного на входе типа датчика:
для унифицированных датчиков – не более 0,1 секунды;
для ТП и ТС – не более 1 секунды.
Если на одном входе установлен ТС, а на другом датчик тока, то время реакции будет не более 1,1 секунды. Для получения быстрого измерения (0,1 секунды) необходимо отключить один из входов (bх-0 = oFF ).
Настройка режима работы ЛУ
ЛУ может работать в следующих режимах:
Для настройки работы ЛУ следует установить следующие параметры:
Режим работы для ЛУ устанавливается соответствующим кодом в параметре А1-1 :
| Режим работы ЛУ | Значение параметра | Комментарий |
|---|---|---|
| ЛУ выключено | oFF | ЛУ не работает, переходит в состояние ОТКЛЮЧЕН, соответствующее ВУ переходит в состояние, определяемое параметром А1-9 |
| Устройство сравнения | 01 | Прямой гистерезис (для нагревателя) |
| 02 | Обратный гистерезис (для охладителя) | |
| 03 | П-образная характеристика (для сигнализации о входе контролируемой величины в заданные границы) | |
| 04 | U-образная характеристика (для сигнализации о выходе контролируемой величины за заданные границы | |
| П-регулятор | 05 | Прямо пропорциональный закон (нагреватель) |
| 06 | Обратно пропорциональный закон (охладитель) | |
| Регистратор | 07 | — |
Настройка режима устройства сравнения
При работе в режиме устройства сравнения ЛУ работает по одному из типов логики (см. рисунок):
Значения уставки (Т) и гистерезиса (Δ) задаются в параметрах регулирования на первом уровне настройки.
Для ЛУ, работающего в режиме устройства сравнения, может быть задано время задержки включения и время задержки выключения. ЛУ включает или выключает ВУ, если условие, вызывающее изменение состояния, сохраняется как минимум в течение времени, установленного в параметрах А1-5 и А1-6 соответственно (см. рисунок).
Для ЛУ, работающего в режиме устройства сравнения, может быть задано минимальное время удержания выхода в замкнутом (параметр А1-7 ) и разомкнутом (параметр А1-8 ) состояниях. ЛУ удерживает ВУ в соответствующем состоянии в течение заданного в этих параметрах времени, даже если по логике работы устройства сравнения требуется переключение (см. рисунок).
Настройка режима П-регулятора
При работе в режиме П-регулятора ЛУ сравнивает текущее значение измеряемой величины с заданной уставкой Туст и выдает на выход сигнал в диапазоне от 4 до 20 мА (для ВУ типа И) или от 0 до 10 В (для ВУ типа У), пропорциональный величине отклонения. Зона пропорциональности (П) при этом задается параметром Δ. Выходной сигнал формируется в соответствии с установленной в параметре А1-1 характеристикой регулятора либо по прямо пропорциональному (нагреватель), либо обратно пропорциональному (охладитель) закону регулирования. Графики, поясняющие принцип формирования управляющего тока П-регулятора для обеих характеристик, приведены на рисунке.
В таблице в качестве примера приведены значения выходного тока для прямо пропорционального регулирования при уставке Т = 500 °С и гистерезисе Δ = 40 °С.
Пример прямо пропорционального регулирования
| Температура, °С | Выходной ток, мА | Мощность регулятора, % |
|---|---|---|
| Более 540,0 | 4 | 0,0 |
| 540,0 | 4 | 0,0 |
| 530,0 | 6 | 12,5 |
| 520,0 | 8 | 25,0 |
| 510,0 | 10 | 37,5 |
| 500,0 | 12 | 50,0 |
| 490,0 | 14 | 62,5 |
| 480,0 | 16 | 75,0 |
| 470,0 | 18 | 87,5 |
| 460,0 | 20 | 100,0 |
| Менее 460,0 | 20 | 100,0 |
Настройка режима регистратора
При работе в режиме регистратора ЛУ сравнивает поданную на его вход величину с заданными в параметрах A1-3 и A1-4 значениями и выдает на соответствующее ВУ аналоговый сигнал в виде тока 4…20 мА, который можно подавать на самописец или другое регистрирующее устройство. Принцип формирования тока регистрации показан на рисунке. Для работы в этом режиме следует установить:
Настройка безопасного состояния ВУ
Безопасное состояние – это состояние ВУ в которое оно переходит автоматически при:
Безопасное состояние задается параметром A1-9 :